
11 时间自动机
11.1 引入
我们已经学习了很多的建模工具,但它们其实都是触发式的,也就是说,我的状态变化一定是由于某个外部事件的产生而触发的。但是在现实生活中,还有一类系统,哪怕没有任何外部的额外事件,其状态也会随着时间的推移而发生变化。这一讲,我们会在之前自动机的基础上加上时间这个维度,介绍一种新的建模工具。
11.1.1 Peterson 算法
在之前学习操作系统的并发控制的时候,我们有了解过 Peterson 算法。
Process 0:
while (true) {
<noncritical section>;
flag[0] = true;
turn = 1;
while flag[1] and turn = 1 do { };
<critical section>;
flag[0] = false;
}
Process 1:
while (true) {
<noncritical section>;
flag[1] = true;
turn = 0;
while flag[0] and turn = 0 do { };
<critical section>;
flag[1] = false;
}
其中变量 flag[0] 和 flag[1] 的含义是对应的进程想要访问临界区(critical section, CS),初始化为 false;turn 初始化为 0,用于解决冲突。
这个算法的思路是:如果进程 i 想要进入临界区,则先举起自己的小旗子,然后用 turn 变量讲机会谦让给另一个进程;当另一个进程想要进入临界区,且自己已经谦让机会的时候,就一直等待另一个进程使用临界区结束,否则自己就可以直接进入临界区。
Peterson 算法的关键在于 turn 变量,哪个进程更快地谦让,则 turn 变量会被另一个进程的谦让行为给覆盖,从而使得更快谦让的进程先获得进入临界区的资格。因此 Peterson 算法制造了一种看似双方争先恐后地谦让机会,但实际上都是自私行为的现象。
11.1.2 Fischer 协议
Peterson 算法实现并发控制的手段是通过共享变量来进行进程的同步,本质上还是离散的,因此依旧可以用一般的自动机进行建模。
另一个并发控制的手段是 Fischer 算法,它通过延时的方式来实现并发控制。
Process i:
while (true) {
<noncritical section>
while id != 0 do {}
delay K1;
id = i;
delay K2;
if (id = i) {
<critical section>
id = 0
}
}
其中 id 是一个共享变量,每个进程有自己的时钟用于延迟,上述算法的正确性需要 K2 > K1。
该算法的思路是,如果一开始有人想要用或者已经用了临界区,我就死等,否则等待 K1 的时间,再宣告自己想要用这个临界区。再等待 K2 的时间,如果没有人提出异议,即 id = i,则进入临界区。
由于 K2 > K1,所以如果进入了临界区就说嘛没有人提出异议,从而这个并发控制是安全的。
如果我们想要对 Fischer 协议作建模,之前的模型就无法处理了。
11.1.3 建模实时系统
对于时间,有两种模型:
- 离散时间域(discrete time domain)
- 连续时间域(continuous time domain)
离散时间域
时钟以一个固定的间隔滴答(tick),系统只在时钟滴答的时候产生变化,在两次滴答之间,系统只单纯地等待。
于是,我们可以选定一个取样时段 ,所有的事件都在 的倍数时间上发生。这样,我们只需要简单地拓展原本的模型即可,相当于在状态中增加了一个整数 作为状态的一部分,最终依旧是一个离散系统。
离散时间域的主要问题是,我们该如何选取 ?
- 如果 太大,那么模型就太粗糙,无法精细刻画系统的行为;
- 如果 太小,那么就会有太多的时间碎片,导致过大的状态空间。
因此,离散时间域主要用于建模本身就具有时钟同步的系统,比如说数字电路。
连续时间域
时间被建模成一个实数,延时可以任意小,这是一个更忠实于时间本身的性质的建模方式,适合于建模异步系统。
但它的状态空间是不可数的,因为实数集是不可数的,所以不可能直接通过暴力的方式来处理。
11.2 时间自动机
11.2.1 基本概念
时间自动机是对于有穷自动机的扩展,加上了时钟,带有连续的实数的语意。它只允许有限的时钟操作,因为这样的话,自动化验证才是可行的。允许的操作有:
- 将一个时钟和一个常数比较
- 重置一个时钟
- 均匀化(uniform)时间流(所有的时钟以相同的速率流动)
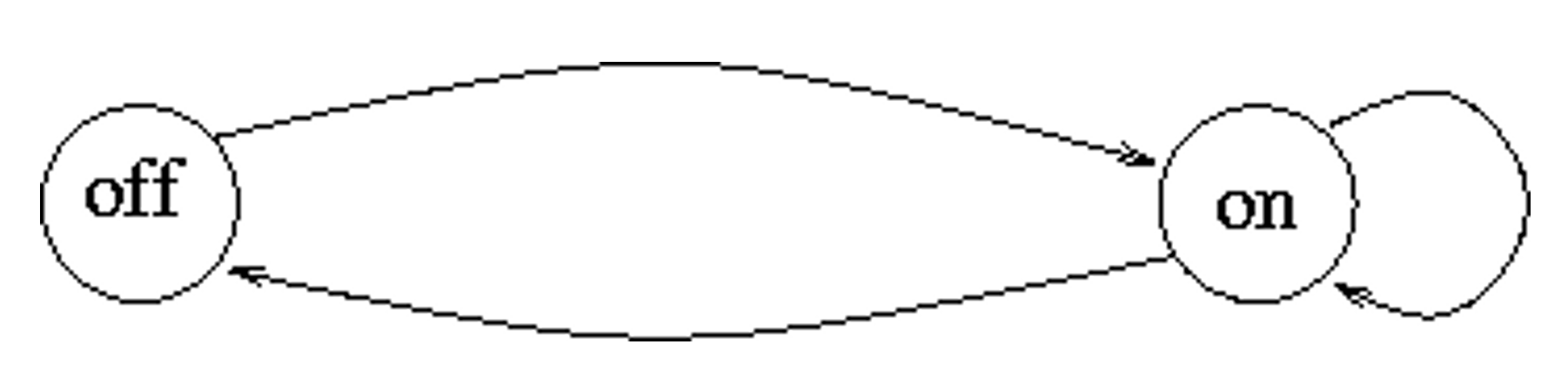
一个时间自动机具有地点(状态)和边,这个自动机只在地点中花费时间,不在边上面花费时间。
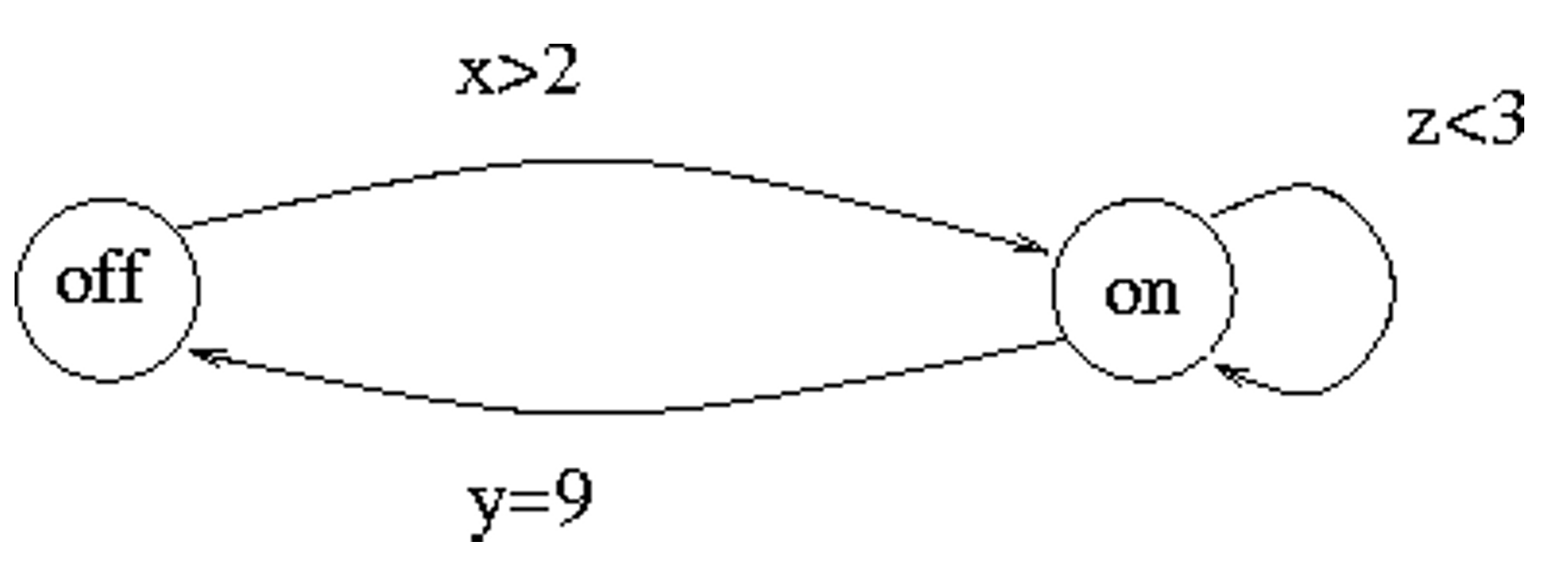
是三个时钟变量,它们的运行速度是一样的:
时钟约束可以作为边上的卫式(guards),只要卫士被满足,这条边就是可通过的,但并不强制。
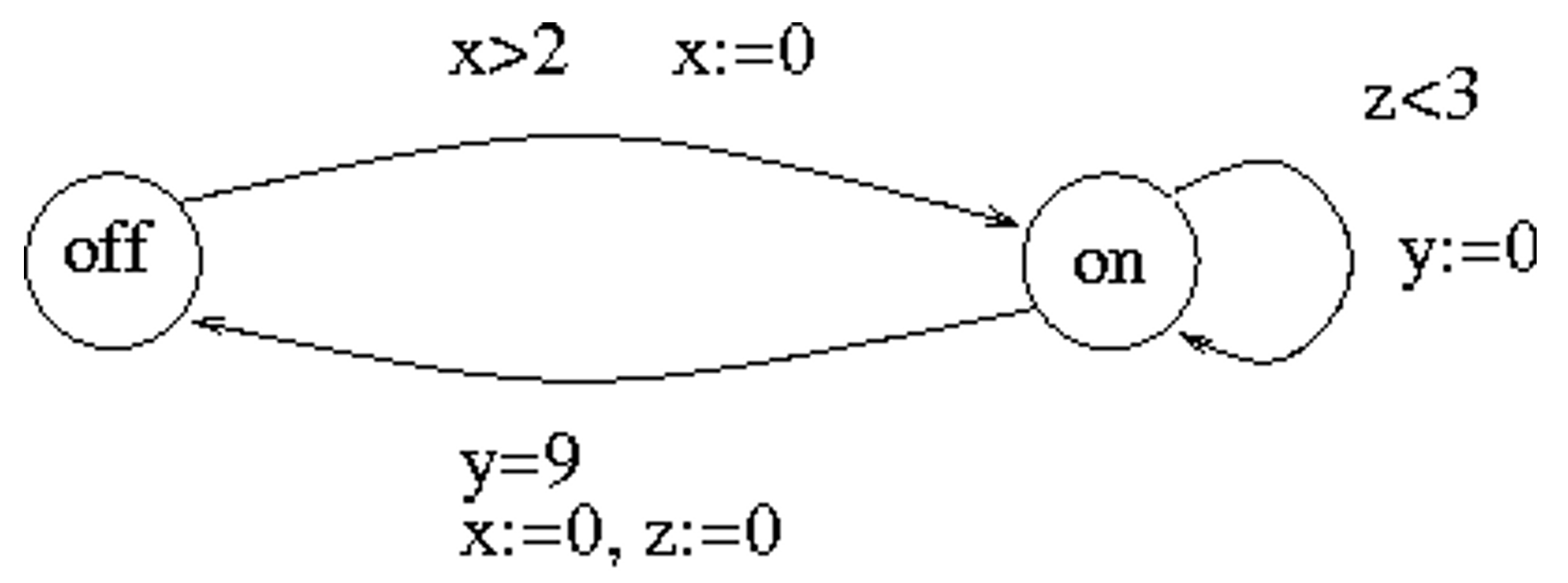
当通过一条边的时候,时钟可以被重置,且只允许将时钟重置为 。
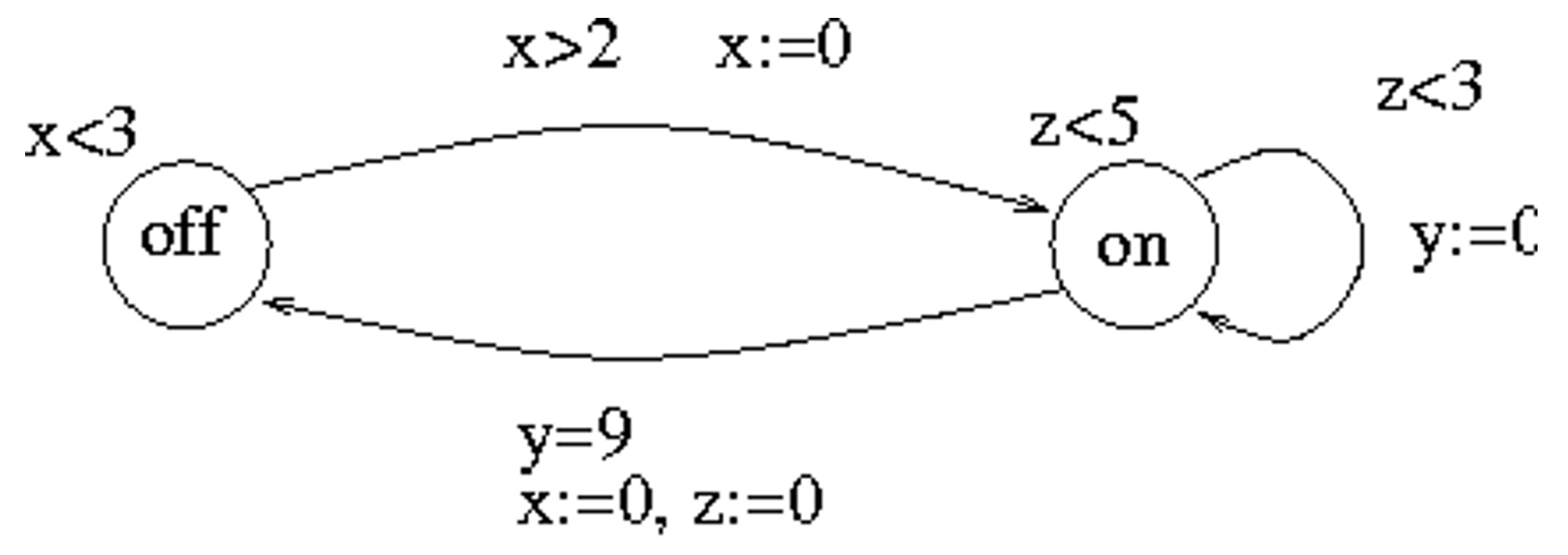
地点上面可以加不变式(invariants),从而禁止系统在一个状态上停留太久。不变式会强制系统选择一条边走,否则时间自动机的语意结束。
11.2.2 形式化定义
定义 10.1
令 是一个时钟变量的集合,那么 时钟约束(clock constraints) 的集合 由如下的文法定义:
其中,。
定义 10.2
一个 时间自动机(timed automata) 是一个 4 元组 ,其中
- 是一个有限的地点(location)的集合;
- 是一个有限的时钟的集合;
- 是一个初始地点;
- 是一个边的集合。
- 一条边的四元组的每个分量的含义是:(源地点,时钟约束,重置时钟集,目标地点)。
时间自动机的状态由位置和时钟值组成的二元组,时间自动机的状态转移有两种:
- 等待(waiting):只有时钟值变化
- 行动(action):位置变化